The kernel computes a stability score at every control tick. The system intervenes when 𝒮 drops below the deployment floor. The decision follows the demands of the stability equation, not the output of a learned classifier.
S =
ΓA + ΓB
ΛA + ΛB
Equation: The stability score per agent
The kernel intervenes when the score drops below the threshold.
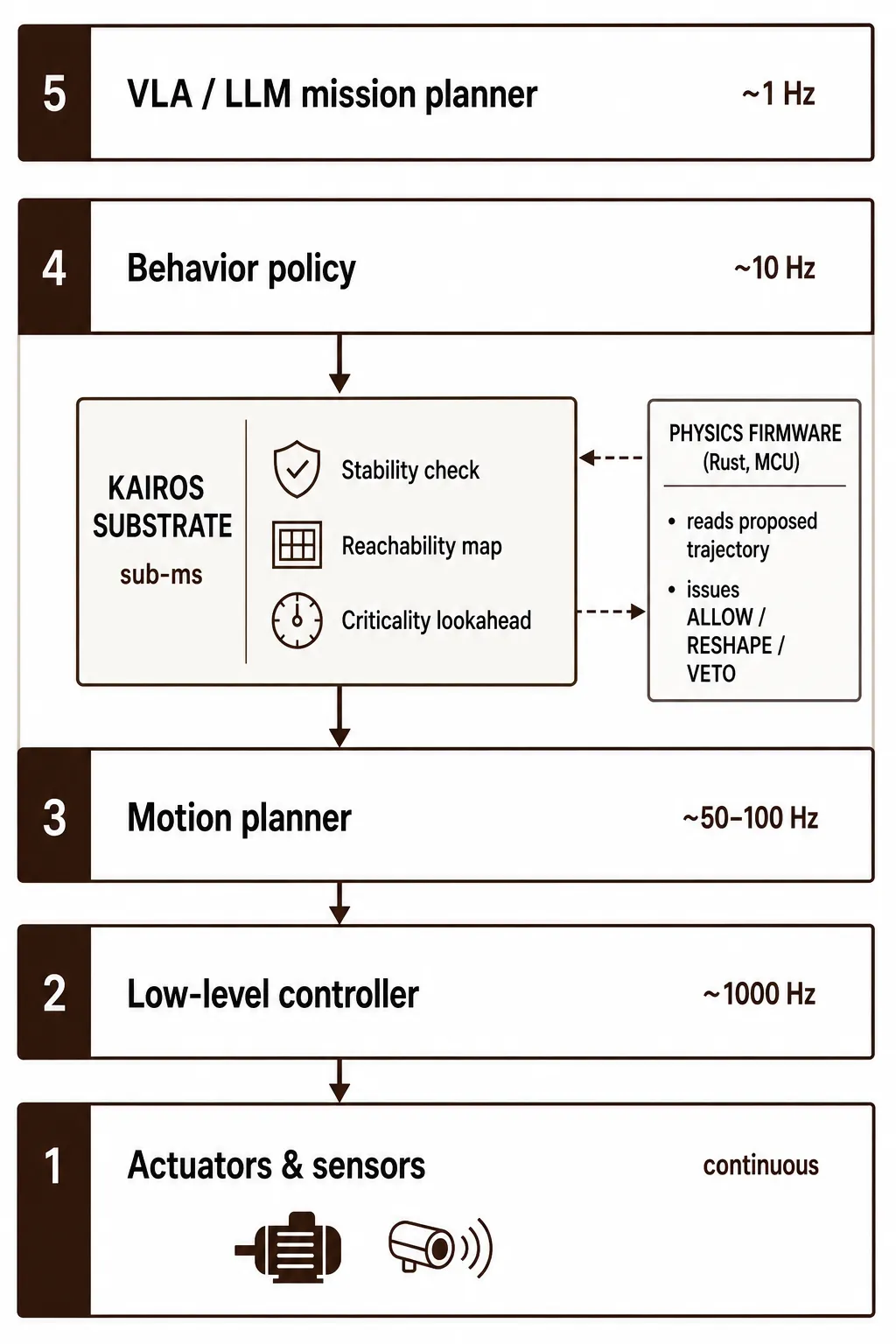
Sub-millisecond
Targeted at the 1 kHz control loop. No GC pauses, no allocator surprises.
Model-agnostic
The kernel evaluates trajectories independently of policy architecture.
GPU-free
CPU-only, embedded-target friendly. Runs on the safety MCU next to the motors.
Memory-safe
The core engine contains zero unsafe blocks.